00C ⥄ 4dof kinematic platform
⟿ robotics, mechanical systems ↭ 2017
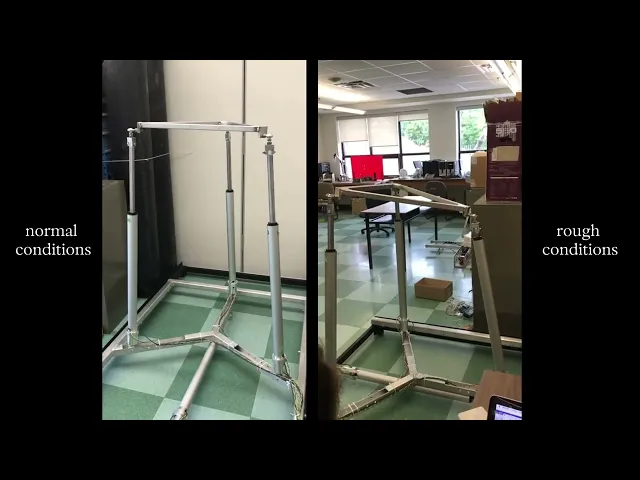
As a research engineer in the Intelligent Systems Laboratory at Dalhousie University, I worked on the early-stage development of a custom 4-degree-of-freedom motion platform designed to simulate ship deck movement under sea-state conditions. The platform served as a testbed for UAV landing research, enabling repeatable physical emulation of ocean motion in a controlled lab environment.
My work focused on the system-level design and robotics architecture. I collaborated on the design of the mechanical layout with other group engineers, selecting a parallel kinematic design with crossed linear actuators to achieve precise motion across four degrees of freedom. I was responsible for electric design with a real-time control interface, and developing the software structure required to receive reference trajectories and convert them into actuator commands through inverse kinematics.
I also worked on the embedded control system, specifying actuator and driver requirements, outlining feedback strategies for accurate positioning, and ensuring the system would be extensible for closed-loop motion tracking using external sensors such as motion capture systems.
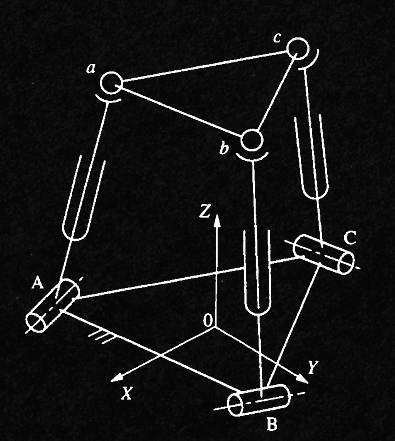
fig 1. main platform configuration
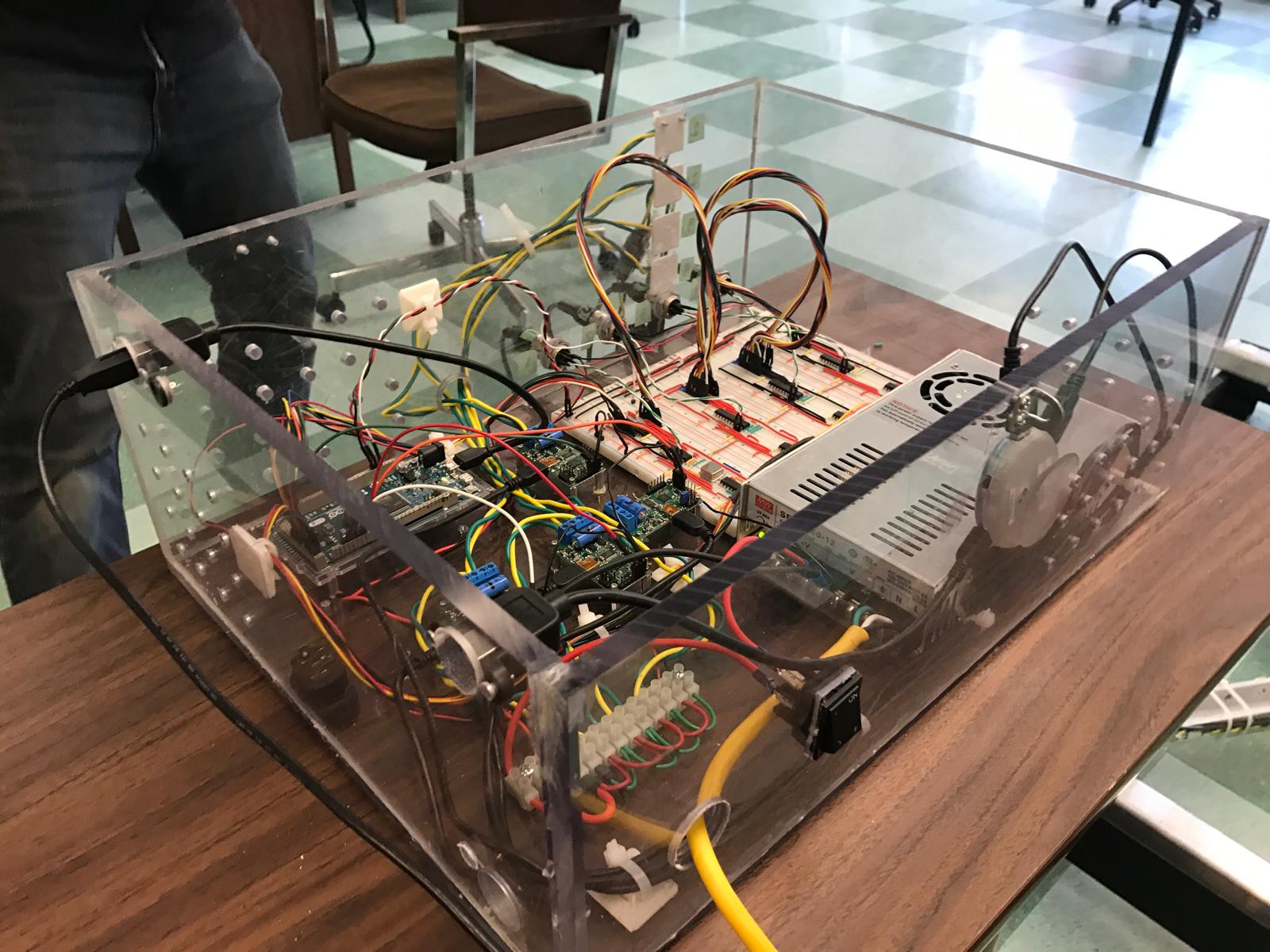
fig 2. electrical assembly with custom prototyped circuit for position control
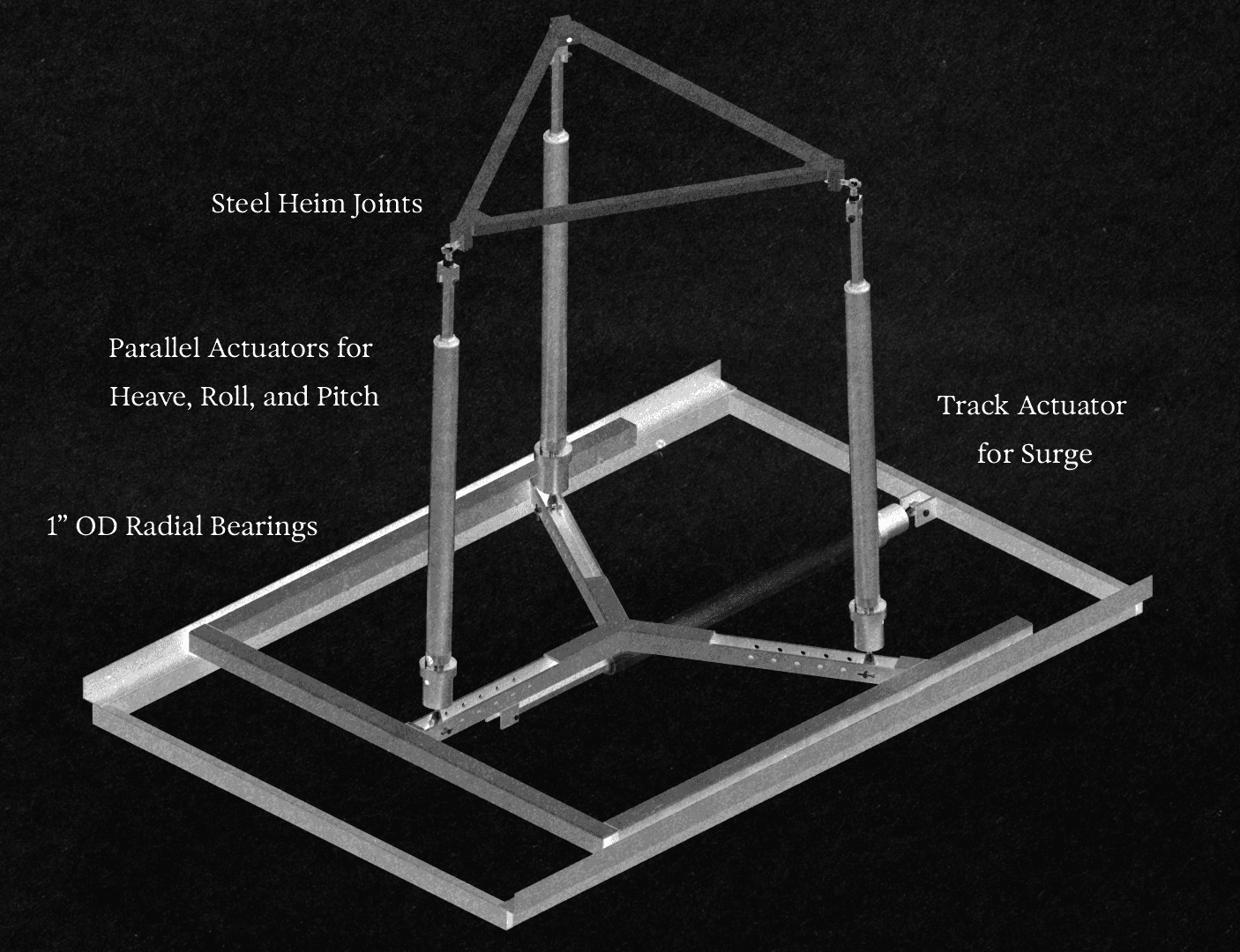
fig 3. full system diagram